MotionBuilder Floor Contact・・・その2
前回の続きです!
モーションの用意です。

以前の記事の手順でNeuronとモーションをリンクさせます。
↑画像のMotion robotをView画面にドラッグ&ドロップして
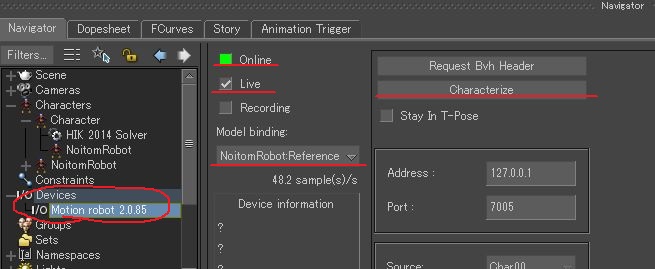

諸々設定すればモーションのリンクが完了です。

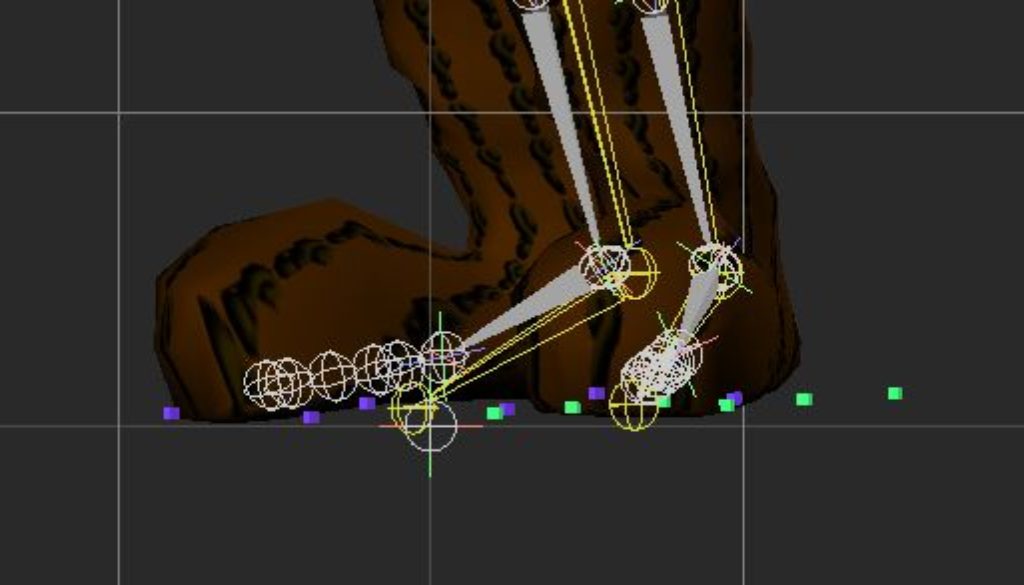
モデルが動くようになりました。

元のゴブリンのモデルが、ほんの少しだけ地面から浮いた状態で出力してしまっていたのでFloor Contactに対してもちょっと浮いてしまっています。
まずはそこから修正します。
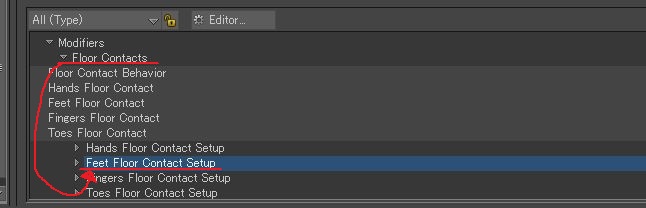
modifiers→Floor Contacts→Feet Floor Contact Setup、

Feet Floor Contact Setup→Feet Contacts Position、

Feet Contacts Position→Foot Heightの数値をいじります。
今回はデフォルトで10.30のところを、

8.50にして
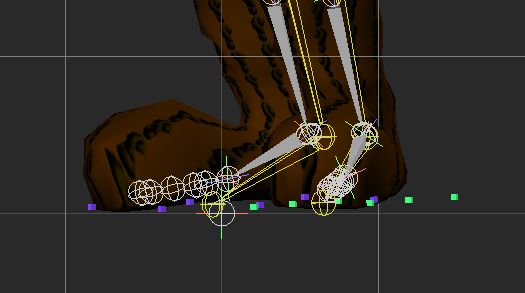
これでFloor Contactと足が揃いました。
早速キャラクターを動かしてFloor Contactが機能してるかを実験してみます。


←がFloor ContactのFeet ContactをOFF、→がONです。
赤線部が床です。OFFだと完全に床下にマーカーが貫通してますが、ONだとマーカーが床を貫通しないようになります。
しかし、現状だとマーカーだけが変化があって肝心の足部分は貫通したままです
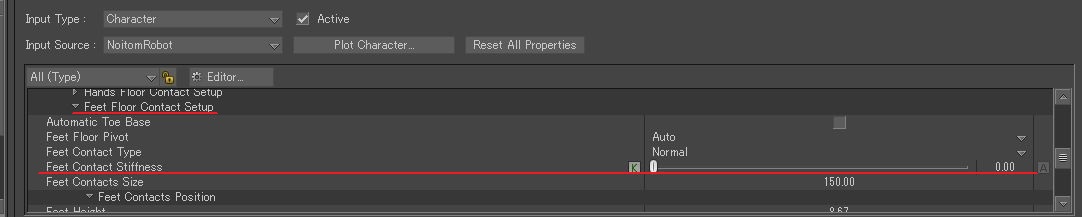
Feet Floor Contact Setup→Feet Contact Stiffnessの数値を変えることで解決できます。
現状は0なのですが、

MAX値の100にしてみると

マーカーの位置に合わせて足が完全に固定されます!
これでどのモーションを割り当てても足が床を貫通することがなくなりました
ただつま先が極端に大きく足が短いキャラなどは、
つま先を無理やり床より上に持ってくるのでそのせいで足のボーンに無理が来てしまうなどちょっとした問題も発生するかも?
Feet Contact Stiffnessの数値で良い感じに調整したいところ!


